|
I am a CS PhD student at Cornell University advised by Tapomayukh Bhattacharjee in the EmPRISE Lab. My research focuses on developing robots that can understand and adapt to the physical and social context of human environments, allowing them to behave safely, intelligently, and appropriately across diverse tasks and embodiments. Previously, I worked with Prof David Hsu at NUS. I also collaborated with Prof Jean Oh as a Robotics Institute Summer Scholar at Carnegie Mellon University and with Prof Junhua Zhao at CUHKSZ. I received my B.E. in Computer Science and Engineering from the Chinese University of Hongkong, Shenzhen (CUHKSZ) in 2022 and M.S. in Computer Science at National University of Singapore (NUS) in 2024. Email / Google Scholar / Github / Twitter / LinkedIn |

|
|
Andrew Violette, Zhanxin Wu, Haruki Nishimura, Masha Itkina, Leticia Priebe Rocha, Mark Zolotas, Guy Hoffman, Hadas Kress-Gazit International Conference on Robotics and Automation (ICRA), 2026 Human-Robot Interaction @ Errors, Mistakes, and Failures in Humans and Robots workshop, 2026 Paper / Code We examine how various kinds of failures affect the perceived reliability of the robot differently, and how this measure recovers without explicit social repair actions by the robot. |
|
|
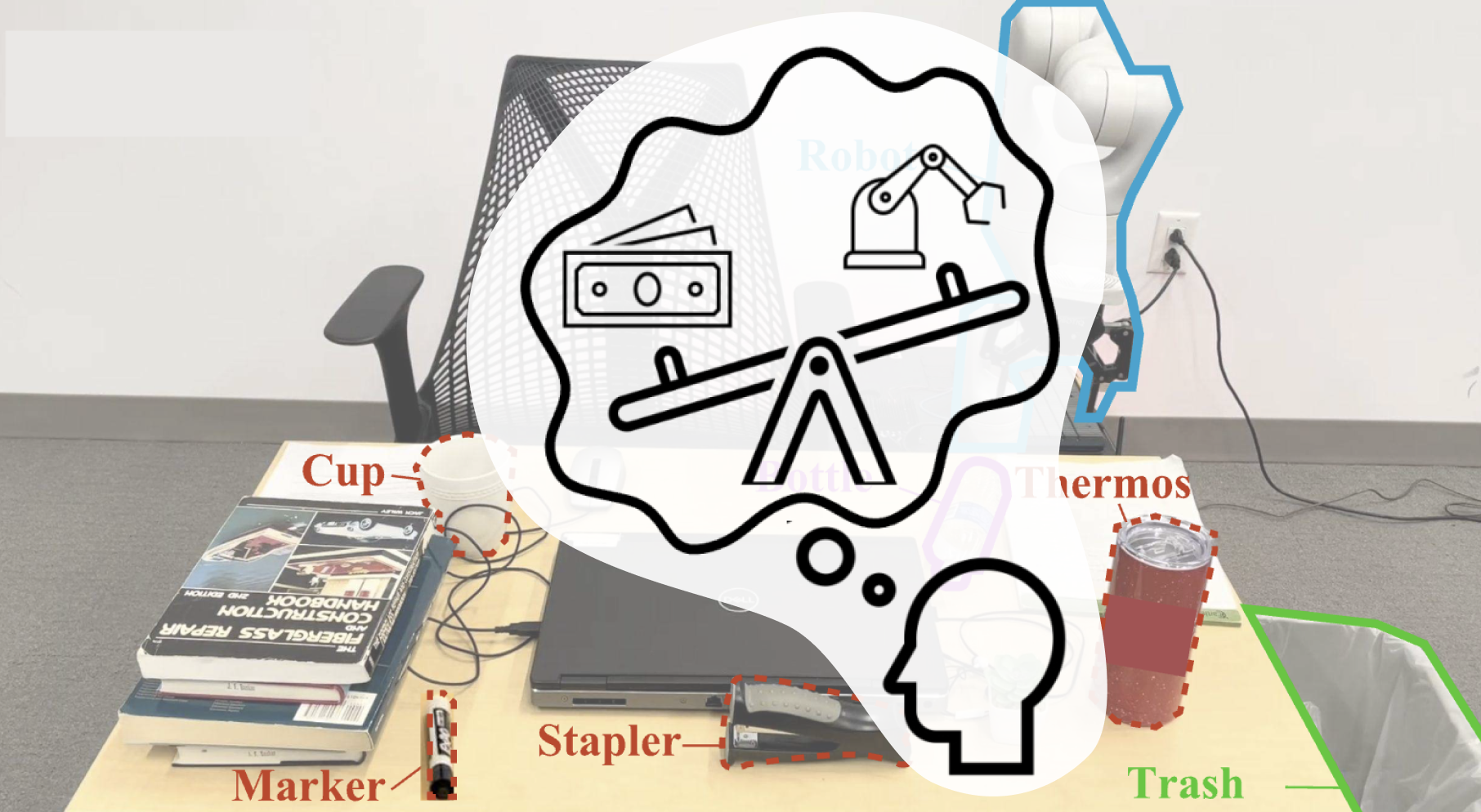
Zhanxin Wu, Bo Ai, Tom Silver, Tapomayukh Bhattacharjee Conference on Robot Learning (CoRL), 2025 [Oral presentation] Paper / Website / Code SAVOR learns skill affordances for bite acquisition-how suitable a manipulation skill (e.g., skewering, scooping) is for a given utensil-food interaction. In our formulation, skill affordances arise from the combination of tool affordances (what a utensil can do) and food affordances (what the food allows). |
|
|
Zhanxin Wu*, Joel Loo*, David Hsu International Journal of Robotics Research (IJRR), 2025 ICRA Vision-Language Models for Navigation and Manipulation workshop, 2024 Paper / Website / Code Our OpenSearch system is capable of searching for a specified object class, given open-set instructions, across diverse embodiments and environments. This is enabled by our Open Scene Graph, which acts as a scene memory for a fully Foundation Model-based (FM) system, that is itself purely built from FMs. |

|
Bo Ai*, Liu Dai*, Nico Bohlinger*, Dichen Li*, Tongzhou Mu, Zhanxin Wu, K. Fay, Henrik I. Christensen, Jan Peters, Hao Su Conference on Robot Learning (CoRL), 2025 Paper / Website / Code This work investigates embodiment scaling laws—the idea that training on a more diverse set of robot embodiments improves generalization to unseen ones. Using a procedurally generated dataset of ~1,000 varied robots, the authors train generalist locomotion policies and show strong zero-shot transfer to real-world robots like the Unitree Go2 and H1. |
|
|
Xiaoyu Liang, Ziang Liu, Kelvin Lin*, Edward Gu*, Ruolin Ye, Tam Nguyen, Cynthia Hsu, Zhanxin Wu, Xiaoman Yang, Christy Sum Yu Cheung, Harold Soh, Katherine Dimitropoulou, Tapomayukh Bhattacharjee International Conference on Intelligent Robots and Systems (IROS), 2025 Paper / Website / Dataset We present OpenRoboCare, a multi-modal dataset for robot-assisted caregiving, capturing expert occupational therapist demonstrations of Activities of Daily Living (ADLs). |
|
|
Bo Ai, Zhanxin Wu, David Hsu International Symposium on Experimental Robotics (ISER), 2023 Published within Springer Proceedings in Advanced Robotics (SPAR) Paper We examines, experimentally and theoretically, one representation that enables visual navigation policies solely trained in the Habitat simulator to generalize to real-world scenes, both indoor and outdoors. |
|
|
Zhanxin Wu, Bo Ai, David Hsu Robotics: Science and Systems @ Learning for Task and Motion Planning Workshop, 2023 Paper / Poster Our framework enables an agent to put misplaced objects back in place with partial map information by exploiting commonsense knowledge in large language models (LLMs). |
|
|
Zhanxin Wu, Henrikus Theorizchy Cleven NUS CS5478 Intelligent Robots: Algorithms and Systems, 2023 Developed a self-driving agent in the Duckietown simulation with classical planning, computer vision, and imitation learning techniques. Placed among the top-scored project in the module. |
| CS4750/CS5750/ECE4770/MAE4760 Foundations of Robotics, Fall 2025, Cornell University CS4750/CS5750/ECE4770/MAE4760 Foundations of Robotics, Fall 2024, Cornell University CS5446/4246 AI Planning and Decision Making, Fall 2023, NUS DBA5106 Foundations of Business Analytics, Fall 2023, NUS CS5242 Neural Networks and Deep Learning, Spring 2023, NUS DBA5106 Foundations of Business Analytics, Fall 2022, NUS CSC4020 Fundamentals of Machine Learning, Spring 2022, CUHKSZ ERG3010 Data and Knowledge Management, Fall 2021, CUHKSZ |
|
Thank you for visiting my pawrent's website 🐾 🐾 🐾 Template from Jon Barron. Last updated: Jun 2025 |
